---恢复内容开始---
看到的结论:E是边数,n是点数量。
Dijkstra(迪杰斯特拉):适用于权值为非负的图的单源最短路径,优先队列优化 O(E+nlgn)
SPFA:适用于权值有负值,且没有负环的图的单源最短路径,SPFA的最坏情况是O(Vn).
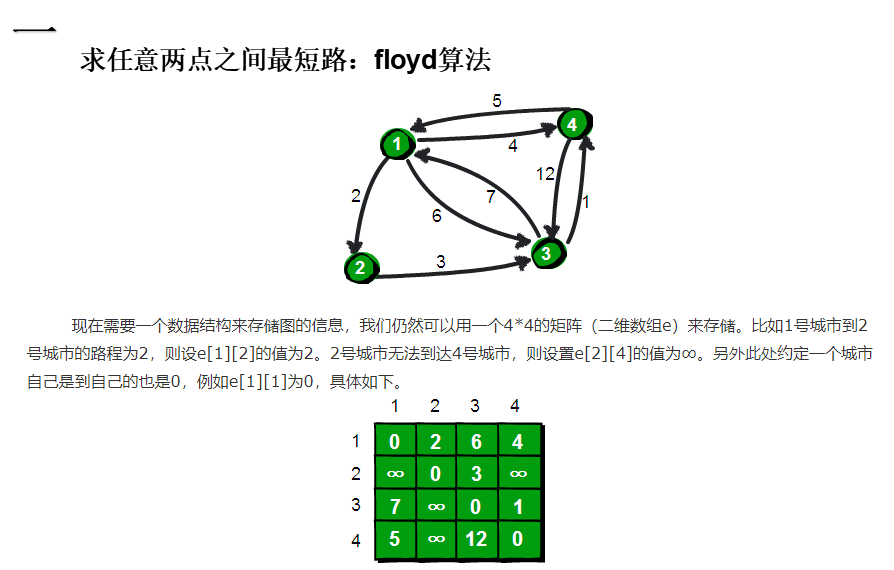
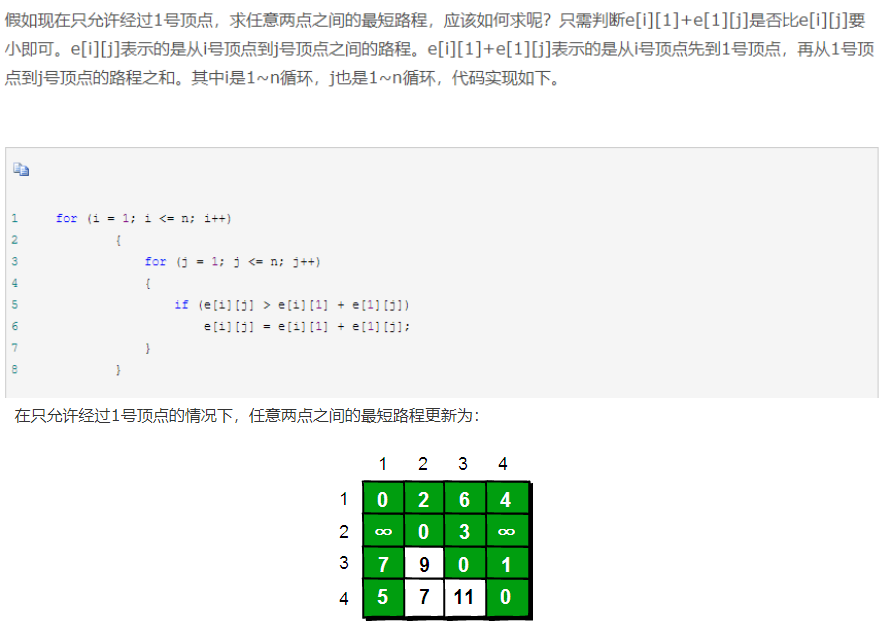
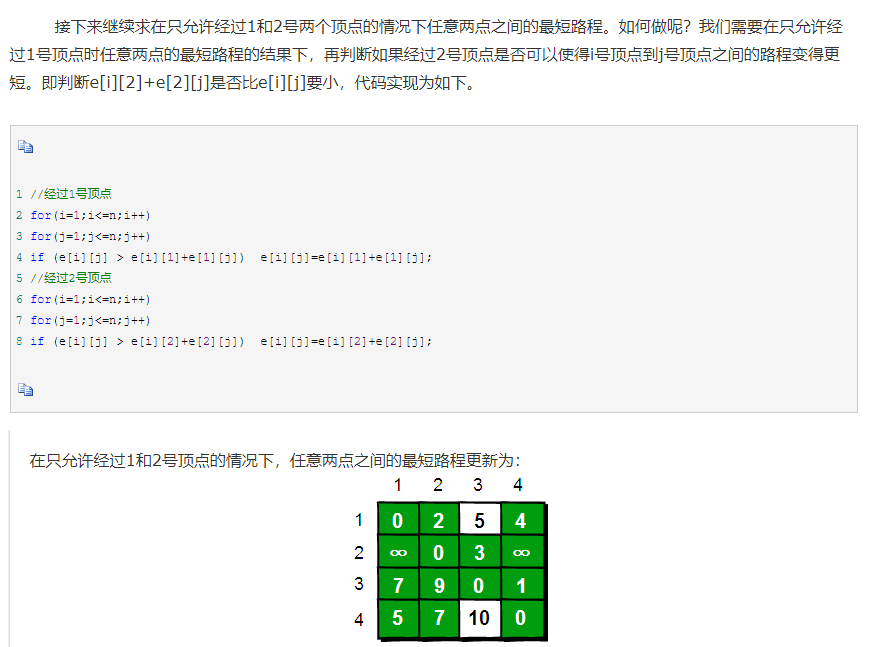
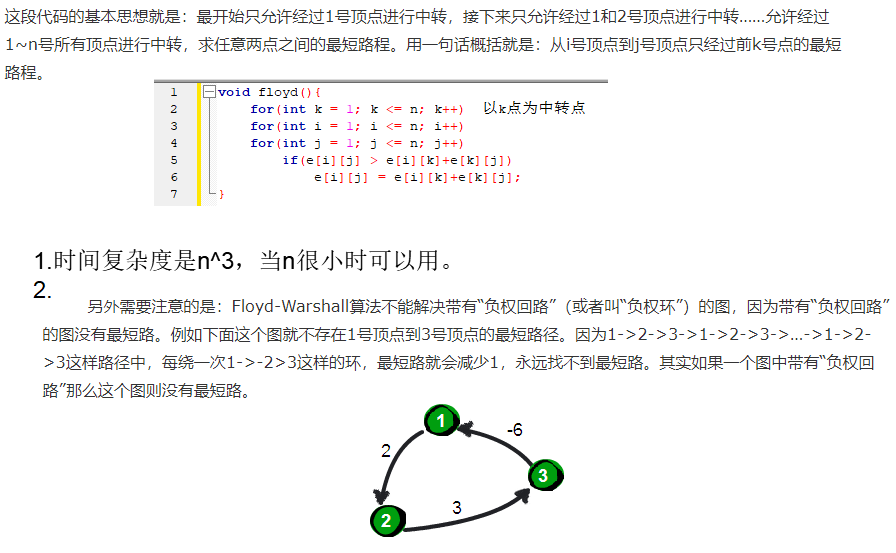
Floyd(弗洛伊德):任意两点之间的最短路径。O(n^3)
给出结论:
(1)单源最短路,当权值为非负时,用Dijkstra,。
(2)单源最短路,当权值有负值,且没有负环,则用SPFA,SPFA能检测负圈,但是不能输出负圈。
(3)数据小,无负环,任意两点之间的距离。弗洛伊德
弗洛伊德
二 迪杰斯特拉
朴实无华迪杰斯特拉
#define inf 0x3f3f3f3f
const int N = 100;
int ma[N][N];
int vis[N], dis[N], ne[N];
void dijkstra(int u){
memset(dis, inf, sizeof(dis));
memset(vis, 0, sizeof(vis));
int st = u;
for(int i = 1; i <= n; i++){
dis[i] = min(dis[i], ma[st][i]);
}
for(int i = 1; i < n; i++){
int mi = inf;
for(int j = 1; j <= n; j++){
if(!vis[j] && mi > dis[j]){
st = j;
mi = dis[j];
}
}
vis[st] = 1;
for(int i = 1; i <= n; i++){
dis[i] = min(dis[i], dis[st] + ma[st][i]);
}
}
}
Dijkstra优化
这个是用前向星模拟vector,然后优先队列优化。
#include <bits/stdc++.h>
#define inf 0x3f3f3f
using namespace std;
const int N = 110;
int m, n, tot;
int vis[N], dis[N], ne[N];
struct node{
int di, num; di是距离,num是编号。
};
bool operator < (node a, node b){ //重载函数,表示在优先队列里排序是怎么排的,是按照x值的从小到大排的。
return a.di > b.di; //从小到大,这个定义是>,是相反的。
}
struct qq{
int u, v, w, next;
} p[110000];
void add(int u, int v, int w){
p[++tot] = (qq){u, v, w, ne[u]};
ne[u] = tot;
}
void betterdis(int st)
{
priority_queue<node> q;
dis[st] = 0;
q.push((node){0,st});
while(q.size())
{
node now = q.top();
q.pop();
if(vis[now.num]) continue;
else vis[now.num] = 1;
for(int i = ne[now.num]; i != 0; i = p[i].next)
{
int u = p[i].u, v = p[i].v, w = p[i].w;
if(!vis[v] && dis[v] > dis[u] + w)
{
dis[v] = dis[u] + w;
q.push((node){dis[v], v});
}
}
}
}
int main()
{
while(cin>> n >> m)
{
memset(dis, inf, sizeof(dis));
memset(ne, 0, sizeof(ne));
memset(vis, 0, sizeof(vis));
memset(p, 0, sizeof(p));
tot = 0;
for(int i = 1; i <= m; i++)
{
int u, v, w;
cin >> u >> v >> w;
add(u, v, w);
add(v, u, w); //无向图
}
betterdis(1); 算的是从1到其他点的距离。
cout << dis[n] << endl;
}
return 0;
}
---恢复内容结束---